
Recent

EEPROM Programmer: Using Data Polling vs RDY/!BUSY Pin for Write Operations
·900 words·5 mins·
loading
·
loading
Both DATA and RDY/!BUSY polling methods cut EEPROM write wait time by roughly threefold compared to fixed delays. They deliver similar performance and are simple to implement on Arduino. The limiting factor is the Arduino’s processing speed, not the AT28Cxx IC.
EEPROM Programmer: Data Corruption on Arduino Serial Connection Reset
·1097 words·6 mins·
loading
·
loading
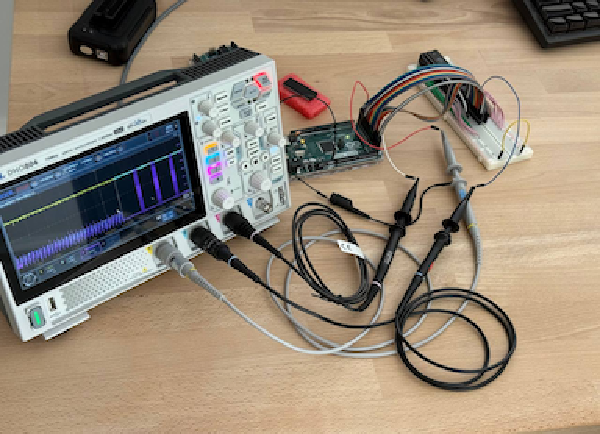
When an Arduino establishes a serial connection, it triggers a board reset that produces transient voltage spikes on the EEPROM pins. These fluctuations can reach up to 2 V, enough to toggle the !WE pin and initiate unintended write operations. As a result, data corruption occurs unless the !WE pin is connected to VCC during read mode to disable writing.
EEPROM Programmer: Implementing Serial JSON-RPC API
·947 words·5 mins·
loading
·
loading
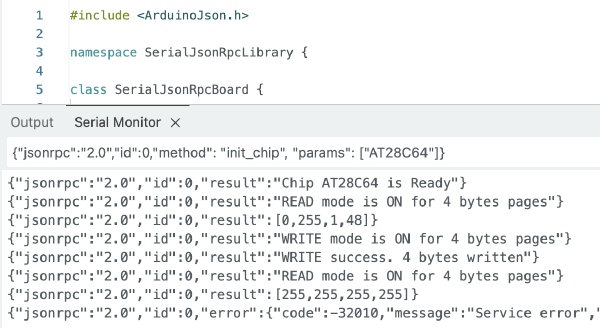
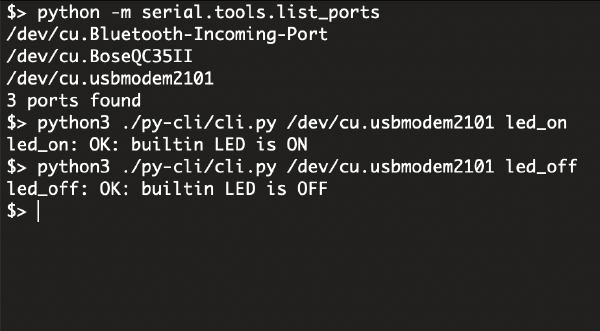
Describes the design and implementation of a JSON-RPC–based API for an Arduino EEPROM programmer, focusing on clean separation between protocol handling and application logic. Details the interaction between the Arduino firmware and the Python CLI used for control and data transfer. Concludes with validation against the XGecu reference programmer to ensure identical read and write behavior.
Project: Serial JSON-RPC for Arduino
·967 words·5 mins·
loading
·
loading
Examines the challenges of implementing data transfer over Arduino Serial, focusing on the trade-offs between raw communication and JSON-RPC. Highlights how memory limits, encoding overhead, and debugging requirements shape protocol design. Demonstrates that encapsulating JSON-RPC logic in a reusable library simplifies development and improves maintainability despite higher resource costs.
How to Debug Misconfigured Arduino Pins
·2011 words·10 mins·
loading
·
loading
Misconfigured or uninitialized Arduino pins generate unstable voltage levels that vary with frequency and signal state. During board reset, all pins enter a floating state, producing undefined signals that can affect connected devices. This can lead to data corruption or unpredictable behavior in chips such as EEPROMs or DACs.